Augmenting Structured Light System Data Sets with Alignments to Portable CMM Data Sets

We often have to capture data for parts that have thin edges such as on turbine blades, airfoils, propeller cores, and many other items. This proposes an interesting problem, it is very common for these items to have tolerances that require them to be scanned using our structured light systems but wrapping data around these thin or “sharp” edges to bridge data from both sides of the part is very difficult.
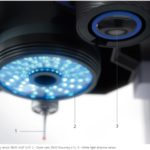
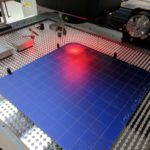
Our structured light scanners use a projector to display lines on a part’s surface while a camera detects the distortion in these lines in order to map the surface. The very nature of these systems means that the source for the projection and the location of the camera are further apart than with other equipment we use. This is one of the root causes of the difficulty in collecting data wrapped around these thin edges. The projector might produce shadows where the camera is “seeing” or the cameras angle to the surface with the projection causes too much distortion in the lines to be able to resolve. Either way, other methods must be used to collect data of the entire surface and still maintain an accurate relationship between the positioning of each snapshot of data.
Often it is necessary to add unique features around a part in order to allow multiple sets of data to align more accurately using the unique features. These features can be as simple as foam stickers in the shape of numbers or letters, or targets specifically designed for use with structured light systems. We also like to use randomly shaped clumps of clay possibly with features pressed into them with pins and punches. These unique features become very useful when aligning two different sets of data. When strategically placed, scans can be taken of parts with thin edges from both sides of the edge. If the clay, stickers, or targets are visible from both sides of the part, their unique shape allow for the data on those items to help align the data from either side of the thin edge of the part.
While very useful, sometimes these targets and clay can be difficult to strategically place around an object that needs to be scanned. Sometimes due to the size of the part, the clay might need to be suspended in an un-stable manner around the part. Some parts we receive can’t have clay attached to them for material contamination reasons. When these situations arise, we like to augment the data captured from a structured light system with data from a system that doesn’t rely on image-to-image alignments. Our portable FARO Arm CMM’s are a prime example of this symbiotic relationship. With a FARO arm, the corresponding point cloud doesn’t have the same difficulties with wrapping around thin edges. All of the captured data is related back to a coordinate system tied to the base of the arm, and all point positions are calculated via information in each of the arms encoders. The point cloud from a system such as this is used as the backbone to align individual scans from the structured light system to. The structured light data captures to localized surface data very accurately, while the FARO arm data is used to position each of those localized surfaces, resulting in accurate datasets that cover the entire surface of the part, even around those pesky thin edges.
Leave a Reply
Want to join the discussion?Feel free to contribute!