Using Transformation Matrices with Point Clouds

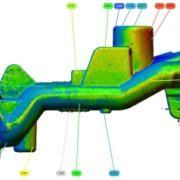
When working with large point clouds, particularly those from our FARO Focus S 350 long range scanner, it is often necessary to modify the existing point cloud to align or organize the data. For example, scans from the long range scanner are translated and rotated in all six degrees of freedom to align to one another and create a contiguous point cloud. To do this, a transformation matrix is applied to the data.